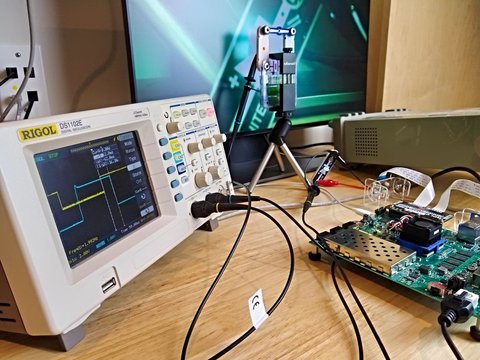
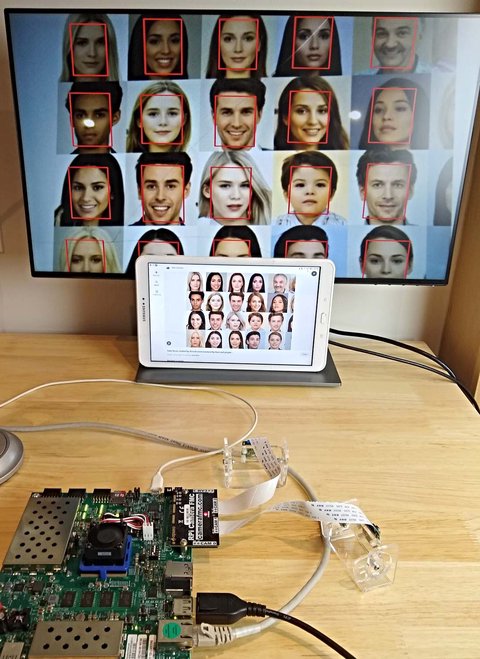
A Smart Camera implemented in PetaLinux 2022.1 on ZCU104Using a Raspberry Pi cameraJuly 12, 202312 minutes
Benchmarking an FPGA based AI Vision applicationDocker, Ubuntu and PetaLinux put to the testJuly 10, 202310 minutes