Title here
Summary here
Building a base Vivado design for the Arty A7 board with hello world and lwIP echo server in SDK
November 8, 20173 minutes
Creating a Vivado design for the MYIR Z-turn Zynq SoM and running hello world and lwIP echo server
October 18, 20173 minutes
Updated video tutorial on using the AXI DMA IP in Vivado 2017.2 with a MicroZed Zynq design
October 11, 201716 minutes
A cheat sheet of useful Tcl commands and tricks for automating Vivado and Xilinx SDK workflows
November 1, 20165 minutes
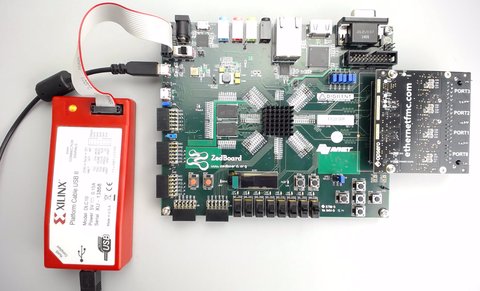
Testing a multi-port Ethernet design by running a lwIP echo server on the ZedBoard with Ethernet FMC.
January 5, 201611 minutes

Tutorial on setting up and testing the AXI DMA engine in a Vivado design targeting the MicroZed.
August 6, 20149 minutes
Tips for modifying BSP code in Xilinx SDK without losing changes during a clean rebuild
May 28, 20141 minute
Tutorial on creating a hello-world application for the Zynq ARM processor using Xilinx SDK
February 27, 20145 minutes
Tutorial on writing a Microblaze software application using Xilinx SDK 13.1
June 28, 20114 minutes