Title here
Summary here

Steps to update the Kria SoM boot firmware for Ubuntu 22.04 and the latest PYNQ release
November 11, 20226 minutes

Walkthrough for installing and configuring PYNQ on the Kria KV260 Vision AI Starter Kit
November 10, 20228 minutes

Guide to setting up a VM and building PYNQ v2.6 for the Ultra96 board
December 16, 20208 minutes
Step-by-step guide to building a PYNQ v2.5 SD image for the Ultra96 board
December 15, 20195 minutes
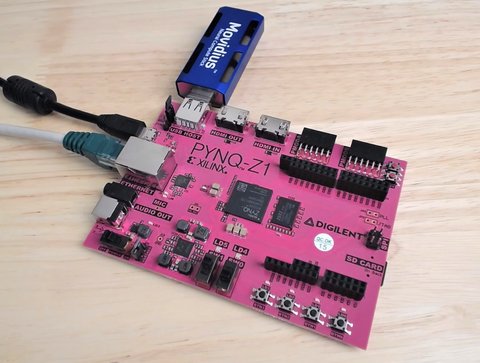
Guide to connecting and configuring the Intel Movidius NCS with the PYNQ-Z1 for AI inference
April 20, 20187 minutes
A curated list of open-source PYNQ projects, overlays, and ports to various platforms
March 29, 20182 minutes
Demonstrating FPGA-accelerated 2D filter and dilate on 720p video achieving 60fps on the PYNQ-Z1
March 28, 20181 minute
Accelerating a Python FIR filter on the PYNQ-Z1 by offloading computation to FPGA fabric
March 22, 20182 minutes
Tutorial on creating a simple custom PYNQ overlay with an HLS adder IP and testing it via Jupyter
March 15, 20182 minutes
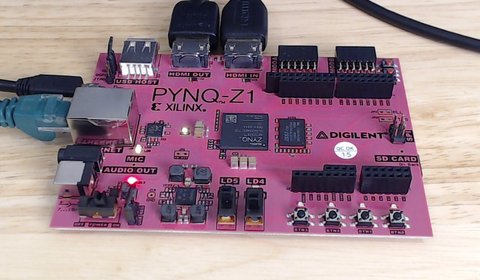
Introduction to the PYNQ-Z1 board and using Python with Jupyter to program the Zynq SoC
February 27, 20183 minutes