Many smart vision applications need to make fast decisions: autonomous vehicles, drones, surveillance and industrial robotics are only a few examples. When developing these kinds of AI vision systems, understanding performance-affecting factors is critical.
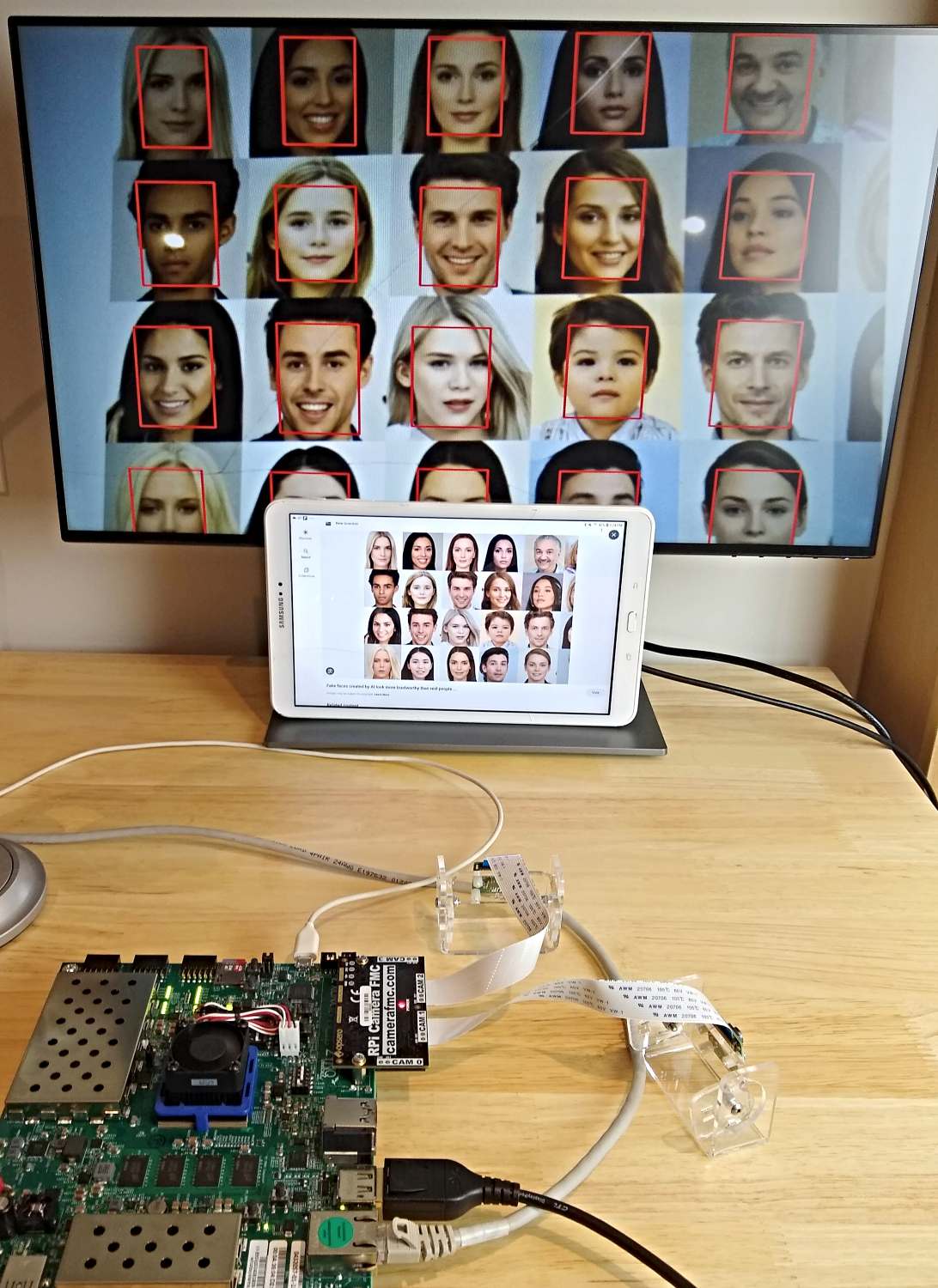
In this post, we’ll explore two such factors: the operating system and camera type. We’ll measure and compare the performance of the NLP-SmartVision app on the ZCU104 board. The setups we’ll use are:
- Operating system:
- Camera type:
- Raspberry Pi camera v2 (2-lane MIPI, 1024x768 resolution 30fps)
- Logitech USB Camera C930e (USB, 800x600 resolution 24fps)
Defining performance
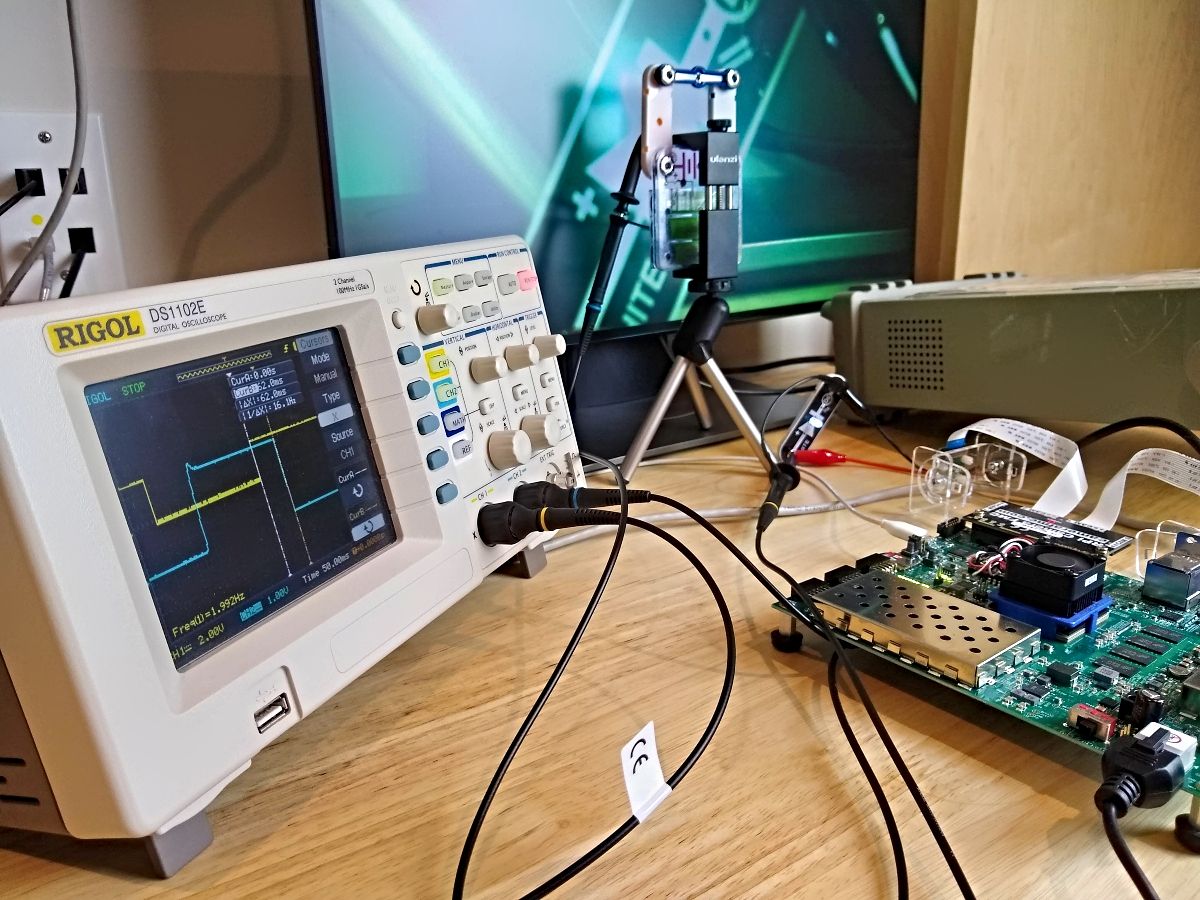
To assess performance, we’ll measure two aspects: frame rate and glass-to-glass latency. For the frame rate, we are going to use on the application’s own ability to measure frame rate. For the glass-to-glass latency, we are going to use a method that involves placing an LED in front of the camera and a detector in front of the monitor. The latency is measured as the time lag between the input and output signals of this system.
[Read More]